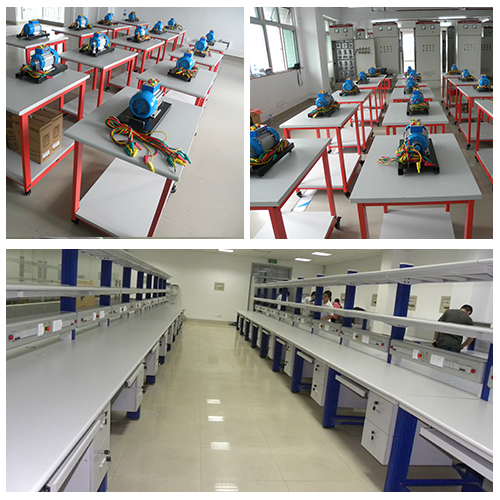
MR087M လှုပ်ရှားမှုထိန်းချုပ်ရေးနည်းပြ သွန်သင်ခြင်း ပစ္စည်းကိရိယာ အာရုံခံကိရိယာလေ့ကျင့်ခန်းခုံ
အကျဉ်းချုပ်
ဤကိရိယာသည်အာရုံခံကိရိယာရှာဖွေတွေ့ရှိမှု၊ ငွေပေးငွေယူအပြောင်းအလဲနဲ့၊ အသိဥာဏ်ရှိသောထိန်းချုပ်မှုနှင့်ထုတ်လုပ်မှုလမ်းကြောင်း၏မောင်းနှင်မှုကိုသိရှိနိုင်သည်။ ၎င်းသည်အခြေခံအထူးပြုဗဟုသုတနှင့်အခြေခံစက်မှုဆိုင်ရာနည်းပညာ၊ မိုက်ခရိုအီလက်ထရောနစ်နည်းပညာ၊ လျှပ်စစ်နှင့်အီလက်ထရောနစ်နည်းပညာ၊ အာရုံခံကိရိယာရှာဖွေခြင်းနည်းပညာ၊ မျက်နှာပြင်နည်းပညာ၊ သတင်းအချက်အလက်အသွင်ပြောင်းနည်းပညာ၊

Function ဝိသေသလက္ခဏာ:
၁။ ဤစနစ်သည်စက်မှုအလူမီနီယံပရိုဖိုင်းဖွဲ့စည်းမှုကိုလိုက်လျောညီထွေဖြစ်စေရန်၊ အလူမီနီယမ်ရထားအမျိုးအစားအမျိုးအစားလေ့ကျင့်ရန်အလုပ်ခုံတွင်အခြေခံယူနစ်သုံးခုတပ်ဆင်ထားသည် - ကားသေးငယ်။ ရှေ့သို့လှည့်ခြင်း (pay-off)၊ လွတ်လပ်မှုသုံးခုကိုင်တွယ်ခြင်း (သယ်ဆောင်ခြင်း)၊ အကွာအဝေးကိုရှာဖွေခြင်း၊ ရေတွက်ခြင်းစသည်ဖြင့်၎င်းကိုတစ်ခုတည်းသော actuator တစ်ခုအတွက်အသုံးပြုနိုင်သည်။ ၎င်းသည်အလိုအလျောက်ထုတ်လုပ်မှုလိုင်း၏စက်ယန္တရားတစ်ခုလည်းဖြစ်နိုင်သည်။
2.System ယန္တရားသည်ဆလင်ဒါမောင်းနှင်မှု၊ ကြိမ်နှုန်းပြောင်းလဲခြင်းကိုချိန်ညှိနိုင်သောအမြန်နှုန်းမော်တာယာဉ်မောင်း၊ PLC နှင့် transducer control interface သည်လုံးဝပွင့်လင်းသည်။ အပြင်ဘက်ဆက်သွယ်မှုကိုထိန်းချုပ်နိုင်သည်။ ၎င်းသည် module ပေါင်းစပ်ထားသောဖွဲ့စည်းပုံကိုလိုက်လျောညီထွေဖြစ်စေနိုင်သည်။ တစ်ခုချင်းစီသည်အလုပ်လုပ်သောယူနစ်တစ်ခုစီသည်အတော်အတန်လွတ်လပ်သော module ဖြစ်သည်။ ၎င်းသည်စံဖွဲ့စည်းပုံနှင့်အံဆွဲအမျိုးအစား module ကိုလိုက်လျောညီထွေဖြစ်စေနိုင်သည်။
3. ကိုင်တွယ်ယန္တရားဟာ့ဒ်ဝဲကာကွယ်မှုဆားကစ်။ ၎င်းသည် PLC ၏ခြယ်လှယ်ခြင်းနှင့် output အချက်ပြမှု၏အနေအထားကိုစစ်ဆေးနိုင်သည်။ ယုတ္တိဗေဒဆိုင်ရာလုပ်ဆောင်ချက်နှင့်ကိုက်ညီသော actuating signal သည် manipulator တုန့်ပြန်မှု actuating signal ဖြစ်သည်။
4. ၎င်းသည်အမျိုးမျိုးသောစက်မှုလုပ်ငန်းဘုံအာရုံခံကိရိယာတပ်ဆင်ထားသည်၊ ပစ္စည်းကိရိယာ၏အချက်အလက်များစုဆောင်းခြင်းစွမ်းရည်ကိုမြှင့်တင်သည်၊ ကျောင်းသားအစီအစဉ်အတွက်အဆင်ပြေသည်။ ၎င်းသည်ကျောင်းသားအားအာရုံခံကိရိယာအမျိုးမျိုး၏အခြေခံကိုလက်တွေ့ကျင့်သုံးစေပြီးလက်တွေ့ကျသောအလုပ်များကိုအသုံးချနိုင်သည်။ ကွဲပြားသောအာရုံခံကိရိယာကို သုံး၍ ကွဲပြားခြားနားသောသို့မဟုတ်တစ်ခုတည်းသောလုပ်ဆောင်ချက်ကိုပြုလုပ်နိုင်သည်။
၅။ ကွန်ယက်ဆက်သွယ်ရေးကိုလုပ်ဆောင်ရန်အတွက်အထက်ကွန်ပြူတာ WINCC configuration software အရ ၄ င်းသည် data လဲလှယ်ခြင်းအတွက် 485, MODBUS, DP ကွန်ယက်နှင့် Ethernet ကိုထောက်ပံ့နိုင်သည်။

အသေးစိတ်ဖော်ပြချက် -
1. နယ်နိမိတ်ရှုထောင့် - ၁၂၄၀ (L) × 720 (W) × 1300 (H) မီလီမီတာ (အံဆွဲမဆန့်ဘဲ)
2. မက်စ် အမြန်နှုန်းခွဲခြင်း - အကြိမ် ၂၀ / တစ်မိနစ်
3 automatic ဆက်တိုက်အလိုအလျောက်အမျိုးအစားခွဲခြင်းလည်ပတ်ချိန် - ၂၄ နာရီဆက်တိုက်ခွဲထားချိန် - ၂၈၈၈ ကြိမ် / တစ်ရက်
4. သတ်မှတ်ထားသောအလုပ်လုပ်စွမ်းအား: AC: 220V 50 Hz ပင်မအလုပ်ပါဝါ: 1.2 Kw
အလုပ်လုပ်သောလေဖိအား: 0.3-0.4 MPa
6. လုပ်ငန်းခွင်ပတ် ၀ န်းကျင် - အပူချိန် -10 ℃ ~ 35 ℃ဆွေမျိုးစိုထိုင်းဆ - ၈၅% (၂၅ ℃)

ထောက်ပံ့နိုင်သောစမ်းသပ်မှုလေ့ကျင့်မှုအကြောင်းအရာ -
၁။ pneumatic system ၏တပ်ဆင်မှုနှင့်ကော်မရှင်
(1 p pneumatic direction control circuit ကိုတပ်ဆင်ခြင်း
(2 p pneumatic speed control circuit ကိုတပ်ဆင်ခြင်း
(3 p pneumatic sequence control circuit ကိုတပ်ဆင်ခြင်း
(4 p pneumatic manipulator ကိုထည့်သွင်းတပ်ဆင်ခြင်း
(5 p pneumatic system ဓာတ်ငွေ့ circuit ၏ connection
(6) အနေအထားညှိနှိုင်းမှုသံလိုက် switch သည်
(7 ne အဆုတ်စနစ်ကော်မရှင်
(8 sw လွှဲထိန်းချုပ်မှု circuit ကိုတပ်ဆင်ခြင်း
2. transducer ၏တပ်ဆင်ခြင်းနှင့်ကော်မရှင်
(1 trans Transducer နှင့် AC motor main circuit တို့၏ဆက်သွယ်မှု
transducer panel ကို၏ setting 2) အဆိုပါ parameter သည် setting ကိုနှင့်စစ်ဆင်ရေး
(3 trans Transducer panel control AC motor ၏အမြန်နှုန်းကိုထိန်းချုပ်သည်
(4 the မော်တာကိုထိန်းချုပ်ပြီး transducer external terminal အရ start နှင့် stop လုပ်ပါ
၃။ လျှပ်စစ်သံလိုက်စက်ကိရိယာများတပ်ဆင်ခြင်းနှင့်အသုံးပြုခြင်း
transmission 1 transmission ဂီယာ device ကို coaxiality ၏ညှိနှိုင်းမှု
(2 belt Belt conveyor အားတပ်ဆင်ခြင်းနှင့်ညှိနှိုင်းခြင်း
(3 carry သယ်ဆောင်ခြယ်လှယ်မှု၏တပ်ဆင်မှုနှင့်ကော်မရှင်
(4 article ဆောင်းပါးခွဲခြင်းဆိုင်ရာပစ္စည်းကိရိယာများတပ်ဆင်ခြင်းနှင့်အသုံးပြုခြင်း
(5 feed အစာကျွေးသောပစ္စည်း၏တပ်ဆင်မှုနှင့်ကော်မရှင်
(6 automatic အလိုအလျောက်ကာကွယ်သောလိုင်းတပ်ဆင်ခြင်းနှင့်အသုံးပြုခြင်း။

၄။ လျှပ်စစ်ထိန်းချုပ်သောနေရာနှင့် PLC ပရိုဂရမ်များတပ်ဆင်ခြင်း
(1 motor ရွေ့လျားမှုထိန်းချုပ်မှု circuit ၏အပြုသဘောနှင့်အနှုတ်လက္ခဏာ၏ဆက်သွယ်မှုနှင့်ရေးသားခြင်းအစီအစဉ်
circuit 2 control Control circuit ကိုထိန်းချုပ်သော motor speed ၏ဆက်သွယ်မှုနှင့်ရေးသားခြင်းအစီအစဉ်
belt 3 belt ခါးပတ်၏အရေးအသားထောက်လှမ်းရေးအစီအစဉ်
(4) အဆုတ်အစီအစဉ်ဆိုင်ရာလုပ်ဆောင်မှုထိန်းချုပ်ရေးပရိုဂရမ်းမင်း
(5) အဆုတ်ထိန်းချုပ်ရေးပရိုဂရမ်းမင်း
(6) Mechatronics ပစ္စည်းကိရိယာထိန်းချုပ်မှုပရိုဂရမ်းမင်း
(၇) အလိုအလျောက်ကာကွယ်သောလိုင်းထိန်းချုပ်မှုပရိုဂရမ်းမင်း