MR099M Collaborative 6-axes Robot Arm With Camera And Gripper Educational Equipment Vocational Training Mechatronics Trainer
1. ထုတ်ကုန် ခြုံငုံသုံးသပ်ချက်
ဤစက်ပစ္စည်းသည် စက်မှုလုပ်ငန်းသုံး စက်ရုပ်များနှင့် စက်ရူပါရုံကို အူတိုင်အဖြစ် ယူသည်၊ စက်ပိုင်းဆိုင်ရာ၊ အနုမြူ၊ ရွေ့လျားမှုထိန်းချုပ်မှု၊ ကြိမ်နှုန်းပြောင်းလဲခြင်းအမြန်နှုန်းစည်းမျဉ်း၊ PLC ထိန်းချုပ်မှုနည်းပညာ၊ မော်ဂျူလာဖွဲ့စည်းပုံ၊ ပေါင်းစပ်ရန်လွယ်ကူသည်၊ မတူညီသောပစ္စည်းများကို လျင်မြန်စွာသိရှိနိုင်စေရန်နှင့် တပ်ဆင်မှုအောင်မြင်ရန် အော်ဂဲနစ်ပေါင်းစပ်ထားသည်။ လက်တွေ့လေ့ကျင့်မှုနှင့် သင်ကြားမှုကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ စက်ရုပ်တစ်ဉီးချင်းစီလေ့ကျင့်မှုနှင့် ပြီးပြည့်စုံသော ပရောဂျက်သင်တန်း အမျိုးအစားအမျိုးမျိုးကို ပြီးမြောက်စေရန်နှင့် စက်ရုပ်တစ်ဉီးချင်းစီလေ့ကျင့်မှု အမျိုးအစားအမျိုးမျိုးနှင့် ပြည့်စုံသော ပရောဂျက်သင်တန်းများကို ပြီးမြောက်ရန် အထူးဒီဇိုင်းထုတ်ထားပါသည်။ ခြောက်ဝင်ရိုး စက်ရုပ် သင်ကြားမှု၊ နေရာချထားမှု၊ ဆုပ်ကိုင်မှု၊ စုဝေးမှု၊ သိုလှောင်မှုနှင့် အခြားသော လေ့ကျင့်မှုတို့ကို ဆောင်ရွက်နိုင်သည်။
၎င်းတွင် လွတ်လပ်မှု ခြောက်ဒီဂရီရှိသော စက်မှုစက်ရုပ်များ၊ ဉာဏ်ရည်ထက်မြက်သော အမြင်စစ်ဆေးရေးစနစ်များ၊ PLC ထိန်းချုပ်မှုစနစ်များနှင့် အစာကျွေးခြင်း၊ သယ်ဆောင်ခြင်း၊ တပ်ဆင်ခြင်းနှင့် သိုလှောင်ခြင်းဆိုင်ရာ ယန္တရားများ ပါ၀င်သည် workpieces သိုလှောင်မှု။
ပလပ်ဖောင်း၏ အစိတ်အပိုင်းများအားလုံးကို ပရိုဖိုင်ဇယားပေါ်တွင် ထည့်သွင်းထားသည်။ စက်ပိုင်းဆိုင်ရာဖွဲ့စည်းပုံ၊ လျှပ်စစ်ထိန်းချုပ်မှုပတ်လမ်းနှင့် actuator သည်အတော်လေးလွတ်လပ်ပြီးစက်မှုစံအပိုင်းများနှင့်ဒီဇိုင်းပြုလုပ်ထားသည်။ ဤပလပ်ဖောင်းမှတဆင့်၊ ၎င်းကို စက်ပိုင်းဆိုင်ရာ တပ်ဆင်မှု၊ လျှပ်စစ်ပတ်လမ်း ဒီဇိုင်းနှင့် ဝါယာကြိုးများ၊ PLC ပရိုဂရမ်ရေးဆွဲခြင်းနှင့် အမှားရှာပြင်ခြင်း၊ အသိဉာဏ်အမြင်ဆိုင်ရာ လုပ်ငန်းစဉ်တည်းဖြတ်ခြင်း၊ စက်မှုစက်ရုပ်ပရိုဂရမ်ရေးဆွဲခြင်းနှင့် အမှားရှာပြင်ခြင်းဆိုင်ရာ အက်ပ်လီကေးရှင်းများအတွက် လေ့ကျင့်သင်ကြားနိုင်ပြီး အသက်မွေးဝမ်းကျောင်းကောလိပ်များနှင့် နည်းပညာကျောင်း အလိုအလျောက်စနစ်ဆိုင်ရာ ပညာရပ်များအတွက် သင့်လျော်ပါသည်။ မေဂျာများ။ "Control Technology" နှင့် "Automation Technology" ကဲ့သို့သော လက်တွေ့သင်တန်းများသည် အင်ဂျင်နီယာသင်တန်းနှင့် ကျွမ်းကျင်မှုပြိုင်ပွဲများကျင်းပရန် အလိုအလျောက်နည်းပညာရှင်များအတွက် သင့်လျော်ပါသည်။

2. နည်းပညာပိုင်းဆိုင်ရာစွမ်းဆောင်ရည်
1. ထည့်သွင်းပါဝါ- တစ်ခုတည်းအဆင့်~220V±10% 50Hz
2. လုပ်ငန်းခွင်ပတ်ဝန်းကျင်- အပူချိန် -10℃~+40℃၊ နှိုင်းရစိုထိုင်းဆ ≤85% (25℃), အမြင့် <4000m
3. စက်၏စွမ်းရည်- <1.5kVA
4. လေ့ကျင့်ရေးပလပ်ဖောင်း၏အရွယ်အစား- 1500mm×880mm×1400mm
5. ဘေးကင်းရေးကာကွယ်မှု- ယိုစိမ့်မှုကာကွယ်မှုနှင့်အတူ၊ ဘေးကင်းရေးသည် နိုင်ငံတော်စံနှုန်းများနှင့် ကိုက်ညီသည်။

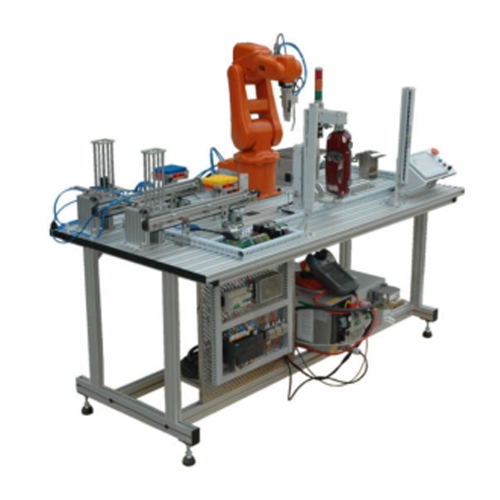
3. စက်ပစ္စည်းဖွဲ့စည်းပုံနှင့်ဖွဲ့စည်းမှု
လေ့ကျင့်ရေးပလက်ဖောင်းတွင် ခြောက်ဒီဂရီလွတ်လပ်မှုရှိသောစက်ရုပ်စနစ်၊ အသိဉာဏ်အမြင်အာရုံစစ်ဆေးခြင်းစနစ်၊ ပရိုဂရမ်လုပ်ဆောင်နိုင်သော ထိန်းချုပ်ကိရိယာ (PLC) စနစ်၊ အစာကျွေးယူနစ်၊ သယ်ယူနစ်၊ အစားအစာစွန့်ပစ်ပစ္စည်း ယာယီသိုလှောင်မှုယူနစ်၊ စွန့်ပစ်အမှိုက်များကို ယာယီလုပ်ဆောင်ခြင်း သိုလှောင်မှုယူနစ်၊ workpiece တပ်ဆင်မှုယူနစ်၊ ၎င်းတွင် ဂိုဒေါင်ယူနစ်၊ အမျိုးမျိုးသော workpieces၊ ပရိုဖိုင်လေ့ကျင့်ရေးစားပွဲ၊ ပရိုဖိုင်ကွန်ပြူတာစားပွဲစသည်ဖြင့် ပါဝင်သည်။
1. ခြောက်ဒီဂရီ လွတ်လပ်မှု စက်မှုစက်ရုပ်စနစ်
၎င်းကို စက်ရုပ်ကိုယ်ထည်၊ စက်ရုပ်ထိန်းချုပ်ကိရိယာ၊ သင်ကြားရေးယူနစ်၊ အဝင်-အထွက်အချက်ပြစနစ်ပြောင်းလဲခြင်းနှင့် ဆုပ်ကိုင်ထားသည့် ယန္တရားတို့ဖြင့် ဖွဲ့စည်းထားသည်။ ၎င်းတွင် pneumatic grippers များ တပ်ဆင်ထားပြီး ကိုင်တွယ်ခြင်း၊ တပ်ဆင်ခြင်းနှင့် workpieces များကို ဖြုတ်ခြင်းစသည့် လုပ်ဆောင်ချက်များကို လုပ်ဆောင်နိုင်သည်။
1) စက်ရုပ်ကိုယ်ထည်သည် ခြောက်ဒီဂရီလွတ်လပ်မှုအဆစ်များဖြင့် ဖွဲ့စည်းထားပြီး ပရိုဖိုင်လေ့ကျင့်ရေးစားပွဲပေါ်တွင် တပ်ဆင်ထားသည်။ လွတ်လပ်မှု 6 ဒီဂရီရှိသည်။ စီးရီးတွဲ-အမျိုးအစားစက်ရုပ်စက်ရုပ်၏ တပ်ဆင်မှုနည်းလမ်းများတွင် မြေပြင်တပ်ဆင်ခြင်း၊ တွဲလောင်းတပ်ဆင်ခြင်းနှင့် ပြောင်းပြန်တပ်ဆင်ခြင်းတို့ ပါဝင်သည်။
2) ပထမဝင်ရိုး၏လုပ်ငန်းခွင်အကွာအဝေးမှာ +170°/-170° ဖြစ်ပြီး အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 370°/s ဖြစ်သည်။
3) ဒုတိယဝင်ရိုး၏လုပ်ငန်းခွင်အကွာအဝေးမှာ +110°/-110° ဖြစ်ပြီး အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 370°/s ဖြစ်သည်။
4) တတိယဝင်ရိုး၏လုပ်ငန်းခွင်အကွာအဝေးမှာ +40°/-220° ဖြစ်ပြီး အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 430°/s ဖြစ်သည်။
5) 4th ဝင်ရိုး၏လုပ်ငန်းခွင်အကွာအဝေးသည် +185°/-185° ဖြစ်ပြီး အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 300°/s ဖြစ်သည်။
6) 5th ဝင်ရိုး၏လုပ်ငန်းခွင်အကွာအဝေးမှာ +125°/-125° ဖြစ်ပြီး အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 460°/s ဖြစ်သည်။
7) 6th ဝင်ရိုး၏လုပ်ငန်းခွင်အကွာအဝေးမှာ +360°/-360° ဖြစ်ပြီး အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 600 ဖြစ်သည်။
8) အများဆုံးအလုပ်လုပ်သောအချင်းဝက်သည် 500mm ဖြစ်သည်။
9) အလေးချိန် 5 ကီလိုဂရမ်
10) စက်ရုပ်သင်ကြားရေးယူနစ်တွင် LCD ဖန်သားပြင်၊ ဖွင့်ရန်ခလုတ်၊ အရေးပေါ်ရပ်တန့်ခလုတ်နှင့် ပါရာမီတာသတ်မှတ်မှု၊ လက်စွဲသင်ကြားမှု၊ အနေအထားတည်းဖြတ်မှု၊ ပရိုဂရမ်တည်းဖြတ်မှုနှင့် အခြားလုပ်ဆောင်မှုများအတွက် အသုံးပြုသည့် လုပ်ဆောင်ချက်ကီးဘုတ်တစ်ခု ပါရှိသည်။
2. အသိဉာဏ်အမြင်စစ်ဆေးခြင်းစနစ်
အမြင်အာရုံထိန်းချုပ်ကိရိယာ၊ အဖြူရောင်အလင်းရင်းမြစ်၊ အမြင်အာရုံခံကင်မရာနှင့် စောင့်ကြည့်ရေးမျက်နှာပြင်တို့ ပါ၀င်သည့် အသိဉာဏ်အမြင်အာရုံစနစ်တစ်ခု တပ်ဆင်ထားသည်။ ၎င်းကို နံပါတ်များ၊ အရောင်များ၊ ပုံသဏ္ဍာန်များ စသည်တို့ကဲ့သို့ workpiece ၏လက္ခဏာများကို သိရှိရန်အသုံးပြုပြီး တပ်ဆင်မှုအကျိုးသက်ရောက်မှုအပေါ် အချိန်နှင့်တစ်ပြေးညီ သိရှိခြင်းလုပ်ဆောင်ချက်များကို လုပ်ဆောင်နိုင်သည်။ ၎င်းသည် I/O ကြိုးမှတစ်ဆင့် PLC သို့မဟုတ် စက်ရုပ်ထိန်းချုပ်ကိရိယာသို့ ချိတ်ဆက်ထားပြီး စမ်းသပ်မှုရလဒ်များနှင့် စမ်းသပ်ဒေတာပေးပို့ရန်အတွက် PLC သို့မဟုတ် စက်ရုပ်ထိန်းချုပ်ကိရိယာသို့ ချိတ်ဆက်ရန်အတွက် အမှတ်စဉ်ဘတ်စ်များနှင့် Ethernet ဘတ်စ်ကားတို့ကိုလည်း ပံ့ပိုးပေးပါသည်။
3. Siemens ပရိုဂရမ်မာနိုင်သော ထိန်းချုပ်ကိရိယာ ယူနစ်
Siemens S7-1200 programmable controller ဖြင့် တပ်ဆင်ထားပြီး၊ ၎င်းတွင် စက်ရုပ်၊ မော်တာ၊ ဆလင်ဒါနှင့် အခြား actuators များ၏ လုပ်ဆောင်ချက်များကို ထိန်းချုပ်ရန် Ethernet ဆက်သွယ်မှု မော်ဂျူး၊ ဒစ်ဂျစ်တယ် ချဲ့ထွင်မှု မော်ဂျူးတို့ ပါရှိသည်။ လုပ်ငန်းတာဝန်များ။
4. နို့တိုက်ကျွေးရေးယူနစ်
၎င်းတွင် ခုန်ပျံခြင်း၊ ရိုတာရီစားပွဲ၊ ပစ္စည်းလမ်းညွှန်ယန္တရား၊ အလုပ်အပိုင်းဆလိုက်၊ ပါဝါထောက်ပံ့မှုပြောင်းခြင်း၊ ပရိုဂရမ်ပြုလုပ်နိုင်သော ထိန်းချုပ်ကိရိယာ၊ ခလုတ်၊ I/O မျက်နှာပြင်ဘုတ်၊ ဆက်သွယ်ရေးမျက်နှာပြင်ဘုတ်၊ လျှပ်စစ်ကွက်လပ်နှင့် DC ဂီယာမော်တာတို့ ပါဝင်သည်။ အစာကျွေးသည့် စားပွဲသို့ ပြန်သွားပြီး စစ်ဆေးမှု စခန်းသို့ အလှည့်ကျ ပို့ပါ။
5. သယ်ယူပို့ဆောင်ရေးယူနစ်
ကြိမ်နှုန်းပြောင်းစက်၊ သုံးဆင့် AC မော်တာ၊ conveyor ခါးပတ်၊ fiber optic အာရုံခံကိရိယာစသည်ဖြင့် ပရိုဖိုင်လေ့ကျင့်ရေးစားပွဲပေါ်တွင် တပ်ဆင်ထားသည့် AC အမြန်နှုန်းထိန်းချုပ်မှုစနစ်အစုံပါရှိသော၊၊ အလုပ်အပိုင်းအစများကို လွှဲပြောင်းရန်အတွက် အသုံးပြုသည်။
6. Workpiece တပ်ဆင်မှုယူနစ်
၎င်းကို workpiece optical fiber sensor၊ processing table၊ ဆလင်ဒါ၊ သေးငယ်သောပစ္စည်းများစသည်ဖြင့် ဖွဲ့စည်းထားပါသည်။ ၎င်းကို conveyor belt တွင်တပ်ဆင်ထားပြီး workpiece ကိုစုဝေးရန်အသုံးပြုသည်။
7. ဂိုဒေါင်ယူနစ်
အလူမီနီယမ် ပရိုဖိုင်များနှင့် စက်မှန်များဖြင့် ဖွဲ့စည်းထားသည်။
8. စွန့်ပစ်ပစ္စည်းများကို ယာယီသိမ်းဆည်းခြင်း။
၎င်းကို ပရိုဖိုင်လေ့ကျင့်ရေးစားပွဲပေါ်တွင် တပ်ဆင်ထားပြီး အစာကျွေးရန်အတွက် ပုံမှန်မဟုတ်သောပစ္စည်းများနှင့် စီမံဆောင်ရွက်ပေးရန်အတွက် ပုံမှန်မဟုတ်သောပစ္စည်းများကို ယာယီသိမ်းဆည်းထားသည်။
4. လက်တွေ့လေ့ကျင့်ရေးစီမံကိန်းများ
1. စက်ရူပါရုံစနစ်၏မူလ၊ အသုံးပြုမှုနှင့် အမှားအယွင်းများ
2. ဝင်ရိုးခြောက်စက်စက်ရုပ်စနစ်၏ နိယာမ၊ အသုံးပြုမှုနှင့် အမှားရှာပြင်ခြင်း။
3. ဝင်ရိုးခြောက်စက်စက်ရုပ်သြဒိနိတ်စနစ်နှင့် စက်ရူပါရုံ ညှိနှိုင်းစနစ်ကြားတွင် ချိန်ညှိခြင်းနှင့် အပြန်အလှန်ပြောင်းလဲခြင်း
4. စက်မှုစက်ရုပ်များနှင့် စက်ရူပါရုံစနစ်များ၏ ပေါင်းစပ်အသုံးချမှုများကို တပ်ဆင်ခြင်းနှင့် ခန့်အပ်ခြင်း။
5. စက်ရူပါရုံစနစ် နမူနာပုံစံ ဆက်တင်၊ ပရိုဂရမ်းမင်းနှင့် အမှားရှာပြင်ခြင်း။
6. သင်ကြားရေးယူနစ်မှတဆင့် စက်မှုစက်ရုပ်များ၏ လက်ဖြင့် အမှားရှာပြင်ခြင်း။
7. သင်ကြားမှုယူနစ်မှတဆင့် ထိန်းချုပ်မှုအမှတ်တစ်ခုစီ၏ သြဒီနိတ်များကို သတ်မှတ်ပြင်ဆင်ပါ။
8. သင်ကြားရေးယူနစ်မှတဆင့် စက်မှုစက်ရုပ်ပရိုဂရမ်များကို ရေးသားပြီး ပြုပြင်မွမ်းမံပါ။
9. စက်ရုပ်ခြေရာခံ သြဒိနိတ် ဆက်တင်
10. စက်မှုစက်ရုပ်စနစ်၏ ဆော့ဖ်ဝဲလ်ဖွံ့ဖြိုးတိုးတက်ရေးနှင့် ပရိုဂရမ်ရေးဆွဲခြင်း။
11. အသိဉာဏ်ရှိသော ရုပ်ပုံထည့်သွင်းခြင်း တည်းဖြတ်ခြင်းနှင့် အမှားရှာပြင်ခြင်း။
12. တည်းဖြတ်ခြင်းနှင့် အမှားရှာပြင်ခြင်းအတွက် အသိဉာဏ်အမြင်ရလဒ်များ
13. အသိဉာဏ်အမြင်ရောင်စုံ နှိုင်းယှဉ်တိုင်းတာခြင်း။
14. အသိဉာဏ်အမြင်အာရုံ ကိန်းဂဏန်း နှိုင်းယှဉ်တိုင်းတာခြင်း။
15. စမတ်အမြင်အာရုံအရွယ်အစား နှိုင်းယှဉ်တိုင်းတာခြင်း။
16. အသိဉာဏ်အမြင်ထောင့်တိုင်းတာခြင်း။
17. အသိဉာဏ်အမြင်အာရုံစနစ်နှင့် စက်မှုစက်ရုပ်များကို ပေါင်းစပ်အသုံးချခြင်း။
18. PLC ပရိုဂရမ် ပရိုဂရမ်းမင်းနှင့် အမှားရှာပြင်ခြင်း။
19. အသိဉာဏ်အမြင်အာရုံစနစ်နှင့် စက်မှုစက်ရုပ်များကို ပေါင်းစပ်အသုံးချခြင်း။
20. အင်ဗာတာနှင့် AC မော်တာ၏ ပင်မပတ်လမ်း ချိတ်ဆက်မှု
21. အင်ဗာတာ panel ၏ ကန့်သတ်ချက် ဆက်တင်နှင့် လုပ်ဆောင်ချက်
22. Frequency converter panel သည် AC motor speed regulation ကို ထိန်းချုပ်သည်။
23. မော်တာစတင်ခြင်းကို ထိန်းချုပ်ပြီး အင်ဗာတာ၏ ပြင်ပ terminal မှတဆင့် ရပ်ပါ။
24. pneumatic direction control loop တပ်ဆင်ခြင်း။
25. pneumatic အမြန်နှုန်းထိန်းချုပ်မှု loop တပ်ဆင်ခြင်း။
26. pneumatic sequence control loop တပ်ဆင်ခြင်း။
27. Pneumatic စနစ်ဓာတ်ငွေ့ပတ်လမ်းချိတ်ဆက်မှု
28. အော်တိုခလုတ်၏ အနေအထား ချိန်ညှိမှု
39. Pneumatic စနစ် အမှားရှာပြင်ခြင်း။














